دانشکده فنی و مهندسی
طراحی، ساخت و کنترل ربات موازی صفحهای پنج لینکی توسط دانشجوی گروه مهندسی مکانیک
گروه مهندسی مکانیک
💢طراحی، ساخت و کنترل ربات موازی صفحهای پنج لینکی (ربات اسکارا موازی یا ربات اسکارا پارالل) در گروه مهندسی مکانیک💢
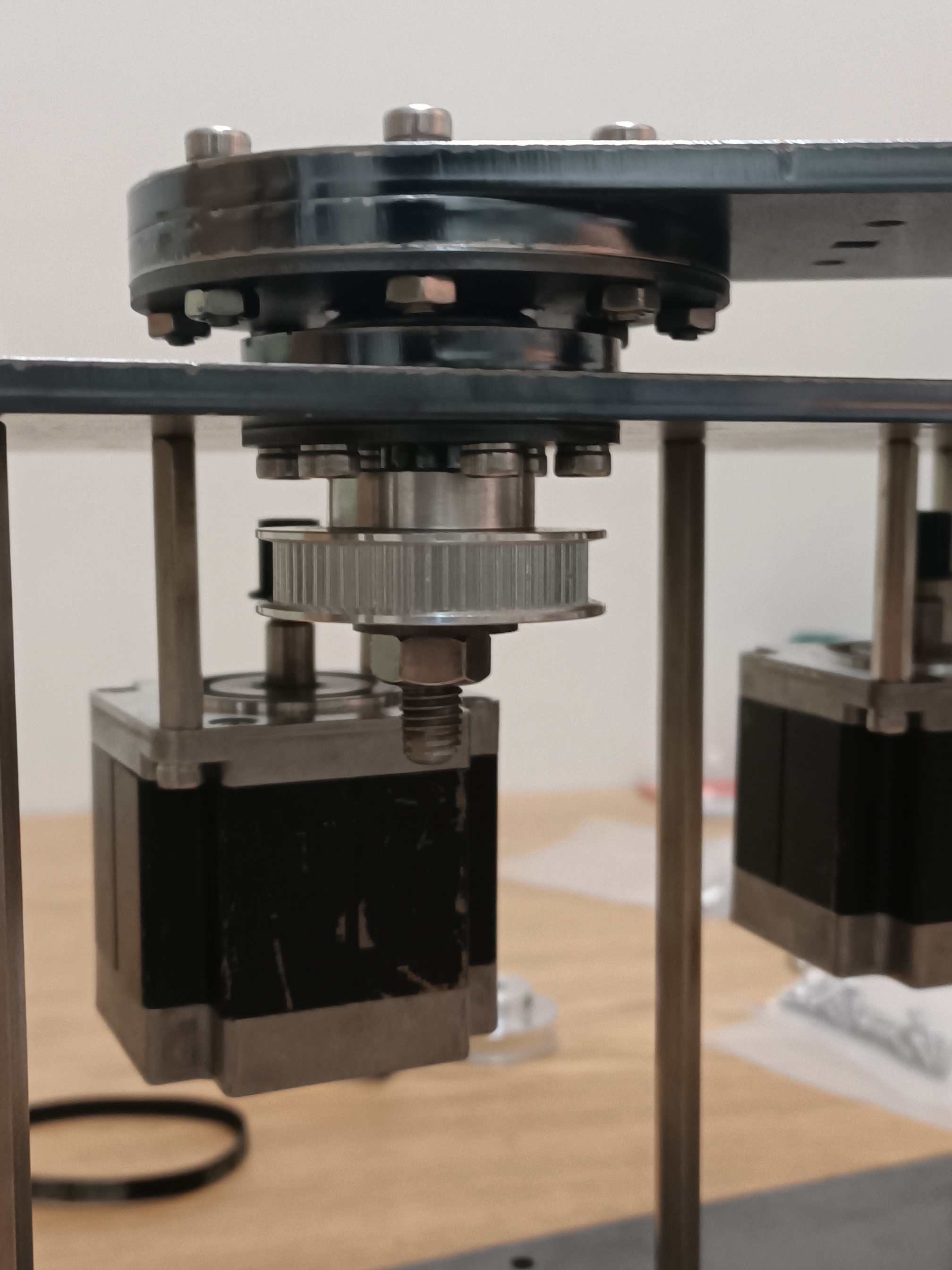
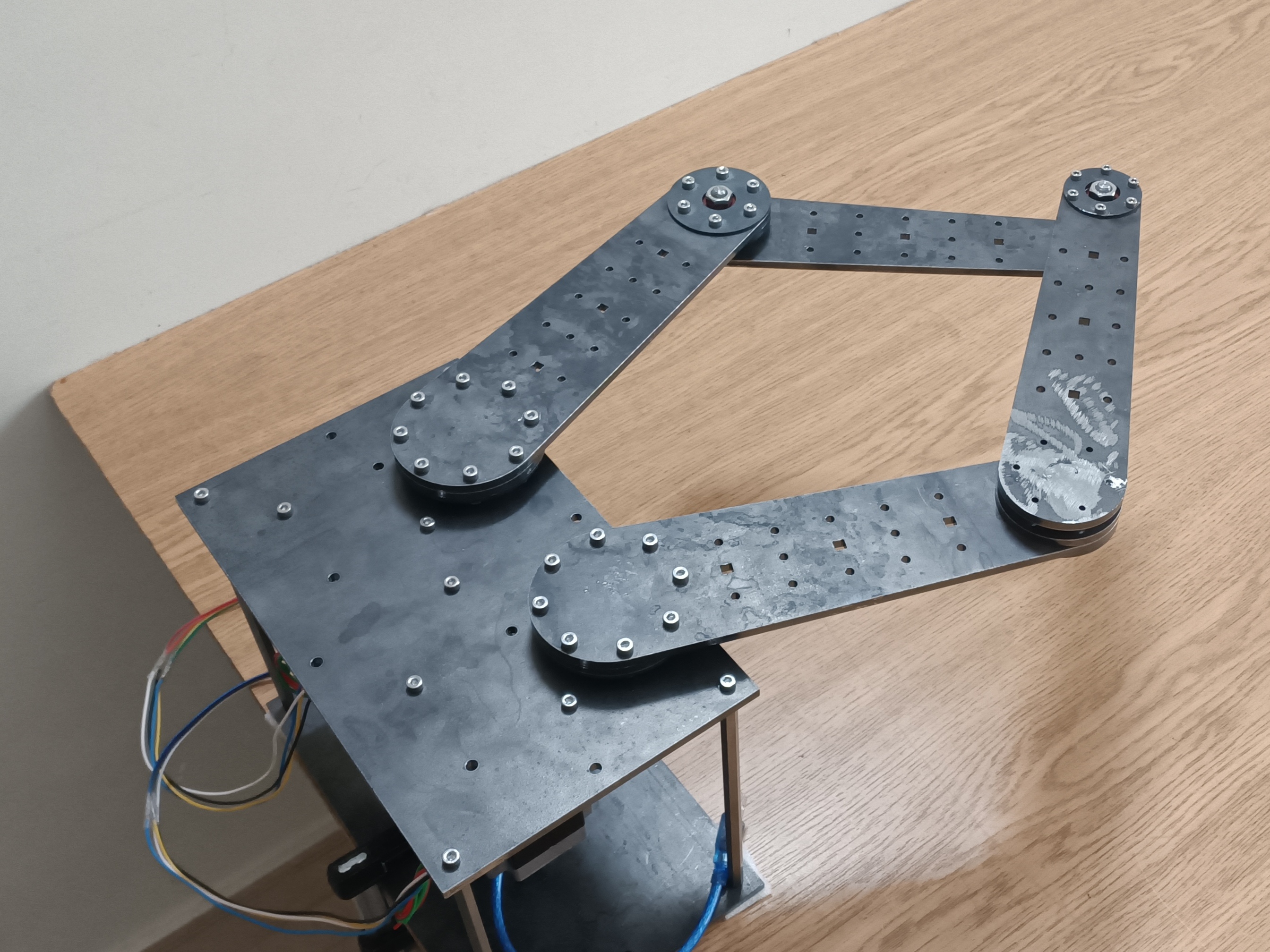
این ربات تحت عنوان پروژه پایانی آقای امیرحسین ایمانی تعریف و اجرا شده است، این نوع از ربات یکی از ربات های مهم در عرصه صنعت قلمداد میشود. راهنمای این پروژه پایانی را سرکار خانم دکتر طباطبایی نسب بر عهده داشتند. ربات های موازی مکانیزم هایی با زنجیره سینماتیکی بسته هستند که در فرم های مختلف توسعه داده شده اند. این مکانیزم ها در کاربردهای صنعتی مختلفی از قبیل صنایع ماشینکاری، شبیه سازهای حرکت، جابجایی، رباتهای پزشکی و ... به کار گرفته شده اند. هدف از این پژوهش مدلسازی، ساخت و کنترل ربات موازی پنج لینکی موازی است. از این رو، ابتدا معادلات سینماتیک مستقیم و معکوس ربات استخراج میگردد. ویژگی های اساسی شامل تحلیل سینماتیک معکوس و مستقیم، تحلیل تکینگی و فضای کاری مورد بررسی قرار گرفته است. پس از اتمام مراحل طراحی، اجزای مورد نیاز برای ساخت ربات فراهم و در آزمایشگاه مونتاژ نهایی شده است. ساخت قطعات اصلی ربات توسط دستگاه برش لیزر انجام شده است و همچنین تعدادی از قطعات توسط فرایند تراشکاری ساخته و در نهایت جوشکاری شده اند. در نهایت نیز برای کنترل و راه اندازی این ربات از برد توسعه آردینو استفاده گردیده است.